
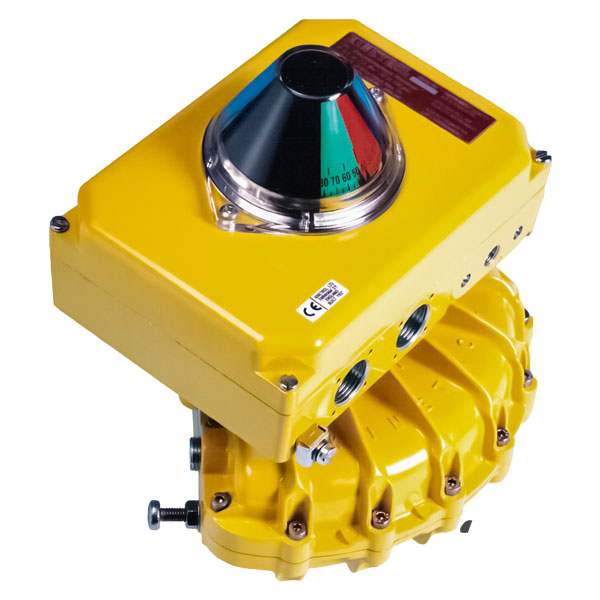
Posicionador Electroneumático EL
Control rápido, suave y preciso desde circuito digital y servoválvula proporcional
El posicionador EL pilota y mantiene el actuador en una posición proporcional a una señal 4-20 mA gracias a su servoválvula de baja potencia.
El circuitor de pilotaje 4-20 mA se compone de un microprocesador que compara la señal de entrada con la posición actual del actuador, que es leída por el potenciómetro de retroalimentación. La información analogica pasa a través de un convertidor A/D 12 bit. Si la posición no corresponde con la señal de entrada, el circuito modifica la señal enviada a la servoválvula, la cual se encarga de pilotar el actuador hasta la posición deseada. El desplazamiento del posicionador es leido por el potenciómetro de retroalimentación y la transmite al microprocesador. Éste calcula las correciones necesarias y las envía a la servoválvula que se encarga de guiar el actuador hasta la posición deseada.
El microprocesador está programado con un algoritmo que le permite controlar el ajuste dinámico de la servoválvula y obtener los resultados más óptimos para cualquier combinación actuador/carga (lenta o rápida, con baja o alta fricción, con baja o alta inercia. Cualquier ajuste se realiza con los pulsadores PGAIN (sensibilidad) y DAMP (amortiguación).
Los posicionadores EL se pueden montar directamente sobre los actuadores Kinetrol modelos 5 a 14, doble o simple efecto.
El conjunto carece de tubbing, cableado o acoplamiento externo. Ideal para un posicionamiento preciso y sin juego.
Para los modelos 16 a 30, se pueden suministrar acoplamientos.


Funcionamiento
El posicionador EL pilota y mantiene el actuador neumático en una posición proporcional a una señal de entrada 4-20 mA, gracias a una servoválvula de baja potencia.
Los posicionadores EL pueden ser montados directamente sobre los actuadores Kinetrol modelos 05 a 14, simple o doble efecto.
El montaje carece de tubbing, cableado o acoplamiento externo: ideal para un posicionamiento preciso y sin juego.
Para los modelos 16 a 30, se pueden suministrar acoplamientos.
- Una sóla señal de entrada
Sin necesidad de alimentación externa: las conexiones se limitan una señal 4-20 mA y la entrada de aire de pilotaje. - Respuesta rápida, suve y precisa
Mediante una placa electrónica y una servoválvula proporcional. - Ajustes simples
Ajustes, calibración y memorización mediante 3 pulsadores y LED de visualización.
Fácil cambio del sentido de regulación (horario/antihorario) sin necesidad de herramientas especiales ni cambio de piezas. - Montaje universal
La versión universal del posicionador permite su montaje a cualquier actuador lineal o de 1/4 de giro.
Especificaciones
| Aire pilotaje: |
Aire de instrumentación 3,5 a 7 bar, limpio, seco y libre de aceite. |
| Señal entrada: |
4-20 mA, con un máx. de 8 V. compatible con alimentación 24 VDC. |
| Peso: | 2,95 Kg. |
| Materiales: |
Caja y tapa: aleación de zinc. Servoválvula: acero inoxidable |
| Recubrimiento: | Epoxy. |
| Protección: | IP 65 |
| Vibraciones: | A choques y vibraciones: hasta 4G. |
| Respuesta: | Salida proporcional 0-90º con 11 curvas disponibles. |
| Sensibilidad: | <0,1 mA. |
| Histéresis: | <0,7% del recorrido. |
| Repetibilidad: | <1% del recorrido. |
| Temperatura de trabajo: | -20º a +70ºC standard. |
| Consumo: | 93 nl/min a 5,5 bar. (14 nl/min en reposo). |
| Ajustes: |
Inicio, final (recorrido). Sensibilidad. Amortiguación. |
Faciles de instalar:
| Dentro de la caja: |
Transmisor de ángulo 4-20 mA-2 hilos aislados de la señal de entrada. Contactos o sensores inductivos de final de carrera. |
| En el exterior de la caja: |
Visor cónico de posición. Conector eléctrico DIN |
| Versión con seguridad intríseca: | ATEX categoria 1 G |
Montaje directo (sin carga):
| Modelo |
05 |
07 | 09 | 10 | 12 | 14 |
| T de 0 a 90º (seg) | 0,7 | 1,1 | 2,8 | 4,1 | 6,0 | 12 |
| Velocidad (º/sec) | 180 | 82 | 33 | 22 | 15 | 7,5 |
Montaje con tubbing externo (sin carga):
| Modelo |
07 |
09 | 10 | 12 | 14 | 16 | 18 | 20 |
| T de 0 a 90º (seg) | 1,0 | 2,4 | 3,2 | 5,0 | 11 | 22 | 45 | 90 |
| Velocidad (º/sec) | 90 | 38 | 28 | 18 | 8,6 | 4,1 | 2 | 1 |

